PHOENIX SPATIALEXPLORER 8
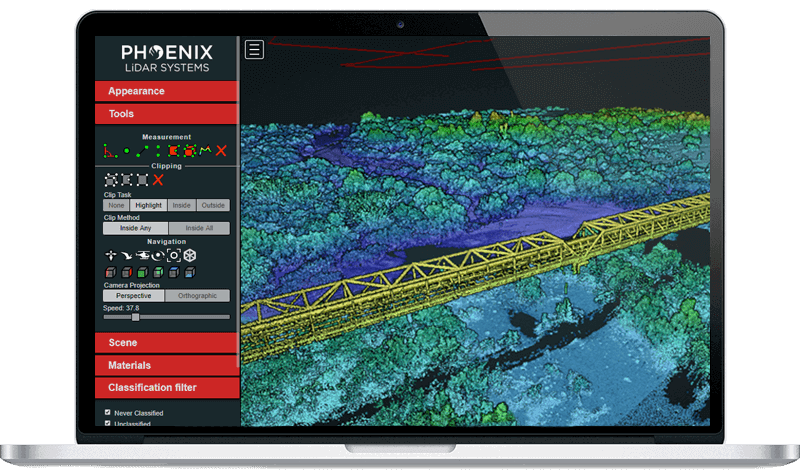
An all-new version of cutting edge LiDAR software has been released! SpatialExplorer is the core of Phoenix LiDAR’s software suite. It is an expandable program that is built to ensure you get the data you need. Starting from data acquisition, SpatialExplorer provides tools for real time streaming point clouds, telemetry monitoring and other in field quality control.
LiDAR Solutions for Today's Generation of Surveyors & Tomorrow's Challenges
Multi-Platform
Mount your Phoenix LiDAR integrated systems on aircrafts, drones, vehicles, vessels and even backpacks.
Real-Time Point Clouds
Leverage the latest laser mapping technology to enable users to acquire precise, survey-grade data & review in real-time with live 3D color point clouds.
Multi-Application
Capture topography, inspect utility installations and construction sites, map disaster areas, conduct research for urban development & more.
Industry Pioneers in Aerial LiDAR Surveying
PHOENIX LIDAR SYSTEMS is a pioneer in the design and development of compact, flexible, survey-grade 3D laser mapping solutions. We teamed with Velodyne to develop the first UAV LiDAR integration prototype, introduced the first real time point cloud visualization software, and launched the first fully automated, cloud based LiDAR post processing solution.
Global Leader in Commercial UAV LiDAR Mapping Solutions
Phoenix LiDAR systems are developed to be durable and adaptable, ensuring they are able to meet the ever changing demands of your aerial LiDAR mapping project.

System Adaptability
Phoenix LiDAR payloads are designed to easily integrate with multiple platforms including multi-rotor and fixed wing VTOL UAS, ground vehicles, backpacks, manned aircraft, and boats, allowing data collection across a wide range of applications.

Streamlined Software Solutions
Phoenix LiDAR Systems offers the most streamlined software solutions in the industry. From planning and acquisition to hosting and delivery, our fully-automated cloud post-processing software provide a simple yet powerful start to finish workflow.

Premium Customization
Phoenix LiDAR Systems produces the most advanced LiDAR solutions in the world. Each system is purposely built to meet our customer’s individual requirements. Solutions can be integrated as standard configurations, or customized with specialized component upgrades.

Training & Support
Phoenix LiDAR Systems offers dedicated U.S. based support with unparalleled response times. We serve our customers through personalized hands-on product training from our expert engineers, pilots, and geospatial professionals.
Automated Post-Processing in the Cloud
CAPTURE | POST-PROCESS | ANALYZE | SHARE
Meet LiDARMill, the first cloud-based, LiDAR platform for post-processing, reporting, and hosting.
LiDARMill enables surveying teams to take advantage of precision laser mapping without investing in expensive software & training.